



















Автоматический робот-манипулятор для сварки JZJ06C-144
Артикул: JZJ06C-144

JZJ06C-144 – компактный и надежный 6-осевой робот-манипулятор, оборудованный сварочным аппаратом, для использования в автомобильной промышленности, машиностроении и металлобработке.
Описание
JZJ06C-144 – компактный и надежный 6-осевой робот-манипулятор, оборудованный сварочным аппаратом, для использования в автомобильной промышленности, машиностроении и металлобработке.
Робот оснащен процессором PC-X86, операционной системой семейства Linux, простой в освоении системой управления 16DI&16DO и мощным двигателем от компании Tsino Dynatron. Поэтому агрегат отличается высокой степенью гибкости, точностью траектории и повторного позиционирования, быстротой и плавностью хода, а также стабильностью.
Данная модель входит в серию JZJ-C – линейку программируемых роботов, которые создают высококачественный сварной шов, увеличивают производительность за счет автоматизации и сокращают затраты предприятия. Сварочный робот безопасен, т.к. он исключает нахождение людей в рабочей зоне.
Процесс сварки осуществляется с помощью электрической дуги, которая нагревает и плавит металл, а также добавления присадочного материала для прочного соединения двух частей.
Робот широко используется в автомобильной, мотоциклетной и аэрокосмической промышленности, производстве авто- и мотозапчастей и аксессуаров, машино- и кораблестроении, металлообработке и других областях, где используется сварка.
Преимущества
- Низкая цена
- Широкий спектр применения и большая гибкость
- Высокая скорость
- Высокая точность повторного позиционирования
- Оптимальный дизайн и высокое качество
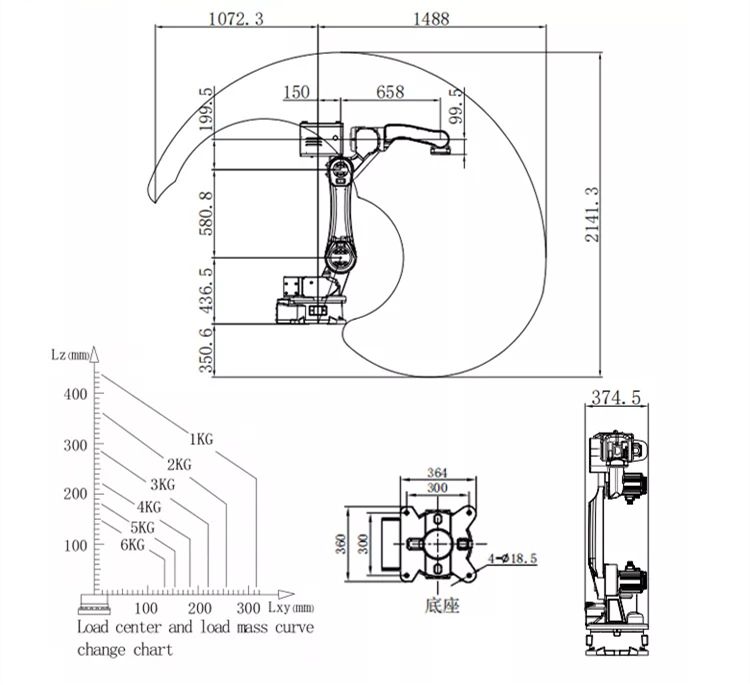
Чертежи робота
 |
Фотографии устройства
 |
 |
Особенности конструкции
|
|
|
|
Рука-манипулятор Рука робота изготовлена из алюминиевого литья на обрабатывающем центре с ЧПУ. На поверхность манипулятора нанесено напыление, защищающее его от внешних воздействий и придающее аккуратный вид. |
Разъем для кабеля В руке робота имеется разъем для присоединения провода. Оно расположено так, чтобы не препятствовать работе манипулятора. Также предусмотрены клапан для воздушного патрубка и разъем для подключения линии передачи данных. |
 |
 |
|
Крепление для установки оборудования Держатель чашечного присоса установлен на торцевом фланце. Присос устанавливается на раму в соответствии с различными продуктами. Устройство подачи удобно в установке и регулировке, имеет широкий диапазон применения. |
Защитное ограждение Обеспечивает безопасность персонала. Предотвращает поломку оборудования и производственные травмы, которые могут случиться в результате нахождения человека в рабочей зоне. |
|
|
|
|
Панель управления |
Шкаф с системами управления |
|
|
|
|
Роботизированный сварочный аппарат |
Устройство подачи проволоки |





Применение
 |
Преимущества предприятия-производителя
Обслуживание по всему миру
В компании JZJRT Co., Ltd работает команда профессионалов, которая удовлетворит потребности клиента и обеспечит обслуживание робота в любой точке мира.
Проектирование и производство
В создании устройств участвуют более 20 опытных инженеров JZJRT Co., Ltd, которые внедряют последние научные достижения в сфере робототехники и машиностроения.
Контроль качества
В компании JZJRT Co., Ltd все этапы производственного процесса соответствуют стандартам ISO.
Технические характеристики
| Форм-фактор | Вертикальный многошарнирный |
| Количество осей | 6 |
| Грузоподъемность | 6 кг |
| Амплитуда движения |
Ось 1: -140° – 140° Ось 2: -90° – 60° Ось 3: -60° – 90° Ось 4: -180° – 180° Ось 5: -90° – 115° Ось 6: -360° – 360° |
| Номинальная скорость движения |
Ось 1: 185°/с Ось 2: 185°/с Ось 3: 280°/с Ось 4: 240°/с Ось 5: 250°/с Ось 6: 750°/с |
| Точность повторного позиционирования | ±0,05 мм |
| Максимальная досягаемость руки | 1499 мм |
| Вес | 170 кг |
| Условия эксплуатации |
Температура окружающей среды: 0~45°C Относительная влажность: 20%-80% (без конденсата) Вибрация: <0,5G Особые указания: место установки должно находиться вдали от легковоспламеняющихся или коррозийных газов и жидкостей, а также источников электромагнитных помех. |
| Степень защиты | IP63 |
| Мощность | 2,3 кВА |
| Расширенный интерфейс | Nine-core IO line 1 way gas circuit |
Параметры шкафа управления и пульта обучения
| Размеры | 450 x 510 x 730 мм |
| Вес шкафа управления | 50 кг |
| Способ охлаждения | Воздушное |
| Источник питания | Трехфазный, переменный ток, 380 В, 50/60 Гц |
| Входной и выходной сигнал | 16DI/16DO |
| Способ управления позиционированием | EtherCAT |
| Расширяемое количество внешних осей | До 6 |
| LAN (Host link) | TCP/IP |
| Интерфейсы | RS485 (1 шт.) RS232 (2 шт.) CAN (2 шт.) USB 2.0 (1 шт.) |
| Блок привода | Сервопривод переменного тока |
| Интерфейс безопасности | 4 external emergency stop signal access |
| Температура |
В работе: 0~+45°C Не в работе: -20~+64°C |
| Относительная влажность | 10%~90% (без конденсата) |
| Вибрация | <0,5G |
| Длина кабеля | 5 м |
Характеристики
Основные характеристики
-
Точность повторного позиционирования, мм±0,05
-
Вес робота, кг170
-
ИнтерфейсRS485, RS232, CAN, USB 2.0
-
Мощность, кВА2,3
-
Вибрация, G<0,5
-
Степень защитыIP63
-
Расширенный интерфейсNine-core IO line 1 way gas circuit
-
Размеры шкафа управления, мм450 x 510 x 730
-
Вес шкафа управления, кг50
-
Способ охлаждения шкафа управленияВоздушное
-
ПитаниеТрехфазное, переменный ток, 380 В, 50/60 Гц
-
Входной и выходной сигнал16DI/16DO
-
Способ управления позиционированиемEtherCAT
-
Расширяемое количество внешних осейДо 6
-
LAN (Host link)TCP/IP
-
Блок приводаСервопривод переменного тока
-
Максимальная досягаемость руки, мм1499
-
Номинальная скорость движения (ось 6), °/с750
-
Температура окружающей среды, °C0~45
-
Относительная влажность20%-80%
-
Форм-факторВертикальный многошарнирный
-
Количество осей6
-
Грузоподъемность, кг6
-
Амплитуда движения (ось 1)-140° – 140°
-
Амплитуда движения (ось 2)-90° – 60°
-
Амплитуда движения (ось 3)-60° – 90°
-
Амплитуда движения (ось 4)-180° – 180°
-
Амплитуда движения (ось 5)-90° – 115°
-
Амплитуда движения (ось 6)-360° – 360°
-
Номинальная скорость движения (ось 1), °/с185
-
Номинальная скорость движения (ось 2), °/с185
-
Номинальная скорость движения (ось 3), °/с280
-
Номинальная скорость движения (ось 4), °/с240
-
Номинальная скорость движения (ось 5), °/с250
-
Интерфейс безопасности4 external emergency stop signal access